Motion Planning Procedure for the Virtual Bronchoscopy
Patents for licensing
A virtual bronchoscopy system that allows the navigation within the model of the lungs is been protected by Universitat Politecncica de Catalunya (UPC) and Bellvitge Biomedical Research Institute (IDIBELL). Partners to further develop the system and/or to establish commercial agreements along with technical cooperation are sought.

The Challenge
Within the lung cancer detection procedures done by the exploration of peripheral lung lesions using ultrathin bronchoscopes, the main challenge taken up by this proposal is the consideration of the geometry and the kinematic constrains of the bronchoscope to plan a path towards the lesion, if possible, or otherwise determine which is the nearest point to the lesion that can be reached. The obtained path can be visualized, followed using a virtual bronchsocopy system that allows the navigation within the model of the lungs, or shown during the real bronchoscopy using virtual reality (VR) methods.
The information of weather the peripheral lung lesion can actually be reached or not is a key information to decide if the real bronchoscopy can be successful or not. If the lesion can be reached, the information of the path to the target may drastically reduce the time wasted during the bronchsocopy, thus alleviating the patient nuisance and risks.
The Technology
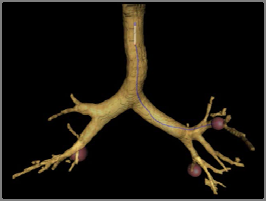
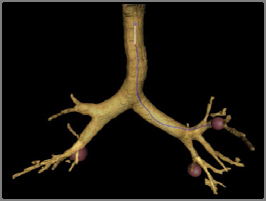
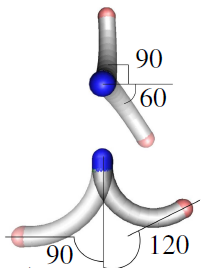
The tip of the bronchoscope is modeled as a kinematic chain with a mobile base that is commanded with three degrees of freedom (the bending of the tip, the rotation around its axis, and the forward advance of the tip base). Robot motion planning techniques are adapted to proved the path of this chain from the trachea to a selected peripheral lung lesion (the procedure assumes as input a model of the lungs and the peripheral lesion target). The planning procedure iteratively selects the best motion considering different costs, and the advance can be done automatically (to obtain the whole path) or by a user navigating the model of the bronchi, and that continually receives guiding information.
Current stage of development
The procedure has been implemented in C++ and tested in several models of lungs obtained from the CT images of real patients.
Applications and Target Market
The main application of the procedure is as an assistance to the bronchoscopy performed with ultrathin bronchoscopes to reach peripheral lung lesions.
The target marked are the virtual bronchoscopy systems providers, the bronchoscope manufacturers, and the pulmonogist teams interested in ultrathin bronchoscope techniques for the lung cancer diagnosis.
Innovative advantages
·
·
·
·
·
· Consideration of the geometry of the tip of the bronchsocope Consideration of the kinematic constraints of the tip of the bronchoscope Information of weather a peripheral lung lesion can be effectively reached A realistic path to the lesion is obtained, with the corresponding commands.
Applicable to virtual bronchsocopy systems Applicable to the real bronchoscopy
The Universitat Politècnica de Catalunya - BarcelonaTech is a public institution dedicated to higher education and research in the fields of engineering, architecture and science, which contributes its knowledge and expertise in order to increase scientific output, transfer its results to society and provide a network of scientific and technical state-of-the-art facilities and technology valorization services that place us at the leading edge of innovation and economic development.
The UPC has established itself as a driver of innovation and is the technology partner of choice for companies and organizations with which it develops projects and builds partnerships. A role borne out by the numerous agreements and research projects that have been set in motion by groups, organizations and laboratories; the creation of new technology-based companies; the generation and exploitation of patents, and the scientific and technical services UPC makes available to its environment in order to generate progress and employment.
The Technology Transfer Office (SGI) is responsible of Designing, coordinating and implementing research valorisation strategies, carrying out the protection policy of the research results, marketing these results through license contracts and designing and setting up the University's enterprise creation model in order to transfer the results of the research to the market, protect and commercialize these results, promote the culture of entrepreneurship and innovation, and create technology-based companies within the UPC environment.
Create your free account to connect with Universitat Politècnica de Catalunya - UPC and thousands of other innovative organizations and professionals worldwide
Send a request for information
to Universitat Politècnica de Catalunya - UPC
Technology Offers on Innoget are directly posted
and managed by its members as well as evaluation of requests for information. Innoget is the trusted open innovation and science network aimed at directly connect industry needs with professionals online.
Need help requesting additional information or have questions regarding this Technology Offer?
Contact Innoget support