
Ultrasonic localization and positioning system for extensive indoor spaces.
Patents for licensing
GEINTRA is a research group from the Department of Electronics of the University of Alcala. The group has developed an ultrasonic system, with a friendly configuration, calibration and deployment, which can be intended to cover extensive indoor spaces. The system works in a GPS-like mode. It uses active beacons and is privacy-oriented, without any node limits being located at the same time. The algorithms used allow to deal with noise problems, multipath propagation and near-far effectswhat gives the system a centimeter precision. The group is looking for companies working in automation, computer or telecommunication sectors to achieve technical collaboration agreements.

New and innovative aspects
The novelty for the ultrasonic positioning system is its low cost and ease of deployment (with a quick installation and automatic or semi-automatic calibration) and its scalability to any space; as well as the performance achieved with centimeter accuracy even under very unfavorable noise environment conditions and multipath configurations.
Main advantages of its use
The use of the positioning system described for indoor navigation allows covering an extensive environment in a low cost, scalable and easy way with a minimum environment intrusion and installation time. It is compatible with all kind of systems that use radio frequency and it is not affected by sound noise. It also allows the positioning of any number of nodes.
Specifications
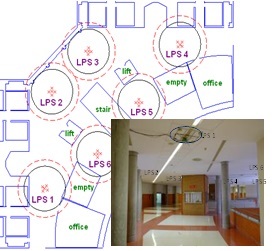
The local positioning system is based on ultrasonic emitters located on the ceiling or high places. The receptor sites are located on the nodes to be located over the ground or placed on it. The ultrasonic beacons are encoded with different binary sequences (using DS-CDMA as multi-access technique) and modulated to the ultrasonic frequency of interest (around 40 kHz). The transducers used ensure the avoidance of noise caused by audible sounds. The system is characterized by the absence of synchronization between emitting beacons and receiving nodes. Each receiver node calculates its position independently and privately. There is not limit on the number of nodes simultaneously located.
The deployment is made from modules of 4 or 5 emitters assembled in a joint structure. It has a coverage area on the ground of about 50 m2. Either 2D or 3D positioning can be undertaken with this number of emitters in each module. Many modules of this type can be used as required, with coverage areas that can overlap, depending on the needs of total space to be covered. In the initial deployment the system needs to be calibrated which means that the coordinates of the emitter beacons have to be determined; This is done automatically with a mobile robot carrying a receiving node or in a semiautomatic mode, taking measurements manually from several known positions. Once the first module is calibrated, the remainder are referenced to it, also in an automatic or semiautomatic mode.
The positioning method is based on hyperbolic trilateration from differences of the time of flight. The low-level and high-level algorithms are prepared to tolerate high levels of sound noise (e.g. tests were conducted with drills connected near the localization of the tests), to minimize the effects of multipath propagation (which are the most common errors introduced in such systems) and near-far effects (so that the farthest beacons are not blinded by the nearest. The positioning accuracy achieved is centimeter, even in relatively hostile environments. The system permits up to about five position updates per second.
To sum up, it is a low cost system that has been tested for the navigation of mobile robots with algorithms that merge external location information provided by the ultrasonic system with the one of the robot dead reckoning. Its adaptation and use in other applications (people or objects location) is immediate and you have just to analyze the location of the receiver microphone to avoid, at least in a sufficient number of cases, the ultrasonic signal direct path obstruction.
Applications
Intellectual property status
Secret know how
Current development status
Developed, available for demonstration
Desired business relationship
Companies working in automation, computer or telecommunication sectors to achieve technical collaboration agreements.
The Technology Transfer Office at Alcalá University serves as a liaison between the University and its socioeconomic environment in terms of research and innovation. It encorages collaboration between research groups from universities and companies/institutions, with the objective to promote and commercialize research results and scientific capabilities.
Some of the services offered by this office are specified in the following list:
- Promotion of R & D and improvement of the relationships with companies.
- Promote the participation in R & D projects applicants to public calls (regional, national and European).
- Advising, processing and monitoring of patents and other forms of industrial protection.
- Support in the negotiation of contracts and agreements for R&D&i
Create your free account to connect with Universidad de Alcalá-OTRI and thousands of other innovative organizations and professionals worldwide
Send a request for information
to Universidad de Alcalá-OTRI
Technology Offers on Innoget are directly posted
and managed by its members as well as evaluation of requests for information. Innoget is the trusted open innovation and science network aimed at directly connect industry needs with professionals online.
Need help requesting additional information or have questions regarding this Technology Offer?
Contact Innoget support

