Acoustic propagation model and location systems for underwater environments
Patents for licensing
GEINTRA, a research group from the Department of Electronics of the University of Alcalá, provides a model for studying the acoustic propagation in underwater environments. This model is useful for communications and positioning systems. The proposed model provides the channel response for the usual environmental phenomena. The model simulate how these phenomena affect a particular acoustic signal, and therefore, the performance of an underwater system based on acoustic signals can be evaluated previously to its deployment. The model has been tested for the case of underwater localization systems. GEINTRA is looking for companies working in telecommunications and IT sectors or performing works related to exact science and physics to achieve technical cooperation agreements.
New and innovative aspects
The propagation model considers the physical phenomena in a wide frequency range (from 200 Hz to 1 MHz) and for any combination of values of the usual parameters. Unlike other models, it is not restricted to a particular type of environment, and additionally it considers the effect of wind-generated waves. The underwater positioning system is easily deployable by not requiring anchored nodes. Using encoded signals allows for minor errors in the position calculation, and in addition, it provides multi-user capabilities, so that the system is scalable to several submerged nodes.
Main advantages of its use
In underwater environments the deployment of any type of system is very expensive. Using the propagation model, a priori estimation of the system performance can be obtained prior to the deployment. The positioning system gives greater independence and versatility, since it can be deployed and collected easily. It can be used in large environments, errors are well bounded (not as odometry systems), it has multi-user capabilities and also noise immunity.
Specifications
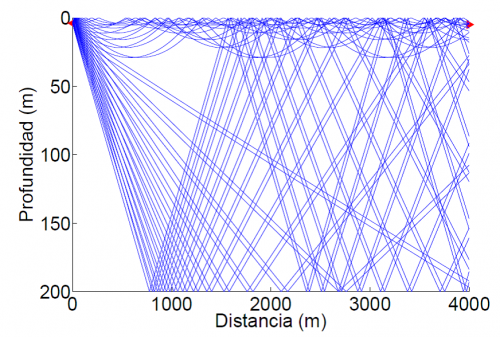
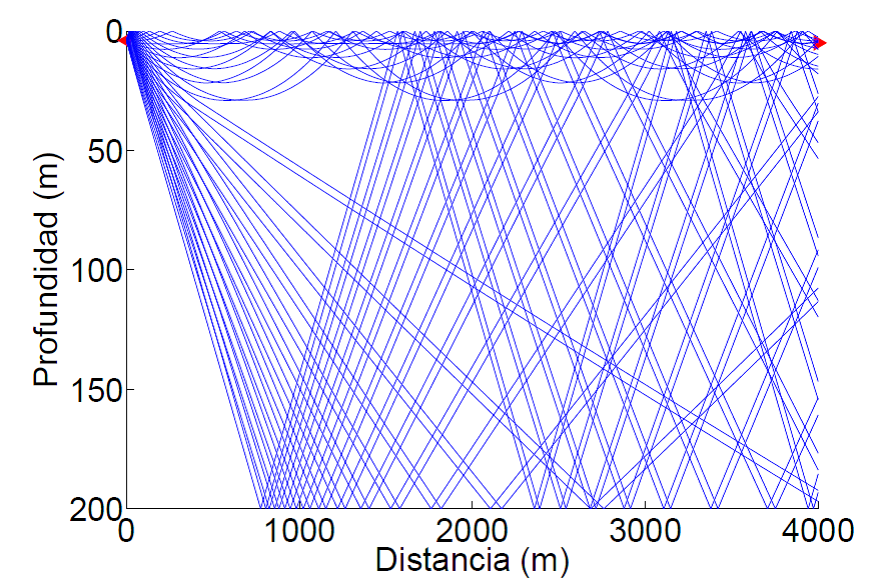
The model is based on ray tracing theory, so you get a visual overview of the propagation that is taking place in the environment. The model considers an emitter located at some depth in the water and calculates the transmission loss and the arrival times of all rays that strike a receiver. Several parameters can be customized, such as the position of the receiver and transmitter, the noise conditions of the environment, sound speed profiles, temperature, salinity, waves, etc.
The model considers the usual phenomena in underwater environments to calculate the transmission loss, such as geometrical spreading, absorption and rebounds in the sea surface and bottom. With regards to the calculation of arrival times, sound speed and bathymetry profiles can be defined, so the model can be used in both shallow and deep water environments, replicating the two-dimensional propagation in any kind of environment. Additionally, this model also considers the dynamic effect caused in the acoustic signal by waves generated by wind at the surface. This dynamic effect consists of a Doppler broadening of the reflected signal spectrum from the sea surface, and fading of the said signal amplitude. This effect is inherent to the acoustic propagation in such environments, and can affect therefore those systems based on phase and amplitude modulation.
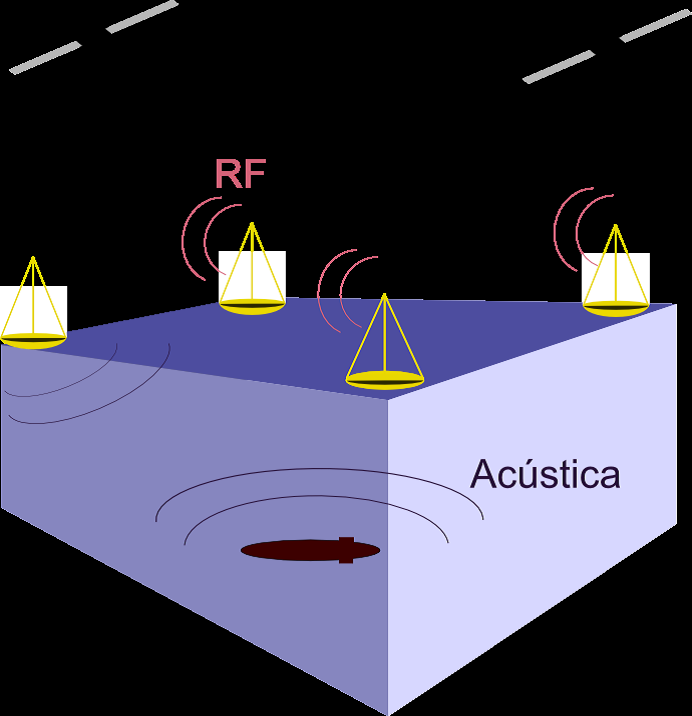
The above model has been used to simulate a positioning system consisting of various surface nodes (buoys or vessels), and a submerged node. This location is done in one of the surface nodes (master node), which is typically the ship where the crew is, so that they can know where the submerged node is at all time (which could be a diver, a submarine robot, etc).
The position of the submerged node can be obtained by the emission, reception and detection of coded signals. These coded signals provide some noise immunity and multi-user capabilities. Surface nodes position are known through the use of GPS, which also provides a common clock to these nodes. For its part, the submerged node does not need to be synchronized. At one point in time, which is known for all surface nodes, the master node sends a code via an underwater transducer. This code will reach the submerged node, which detects it and responds with its own code. This information will come to the surface nodes, calculating then the time between the code emitted from the master node to the code reception from the submerged node. This information is transmitted through a surface radio frequency link to the master node. With this information and the position of the surface nodes, the master node can calculate the position of the submerged node. This position is affected by an error ranging from centimeters to several meters, depending on how accurate is the acoustic code detection, and how large is the error in the surface position of the nodes provided by the GPS.
Applications
Intellectual property status
Software registered
Secret know how
Current development status
Development phase
Developed, available for demonstration
Desired business relationship
Companies working in telecommunications and IT sectors or performing works related to exact science and physics to achieve technical cooperation agreements
The Technology Transfer Office at Alcalá University serves as a liaison between the University and its socioeconomic environment in terms of research and innovation. It encorages collaboration between research groups from universities and companies/institutions, with the objective to promote and commercialize research results and scientific capabilities.
Some of the services offered by this office are specified in the following list:
- Promotion of R & D and improvement of the relationships with companies.
- Promote the participation in R & D projects applicants to public calls (regional, national and European).
- Advising, processing and monitoring of patents and other forms of industrial protection.
- Support in the negotiation of contracts and agreements for R&D&i
Create your free account to connect with Universidad de Alcalá-OTRI and thousands of other innovative organizations and professionals worldwide
Send a request for information
to Universidad de Alcalá-OTRI
Technology Offers on Innoget are directly posted
and managed by its members as well as evaluation of requests for information. Innoget is the trusted open innovation and science network aimed at directly connect industry needs with professionals online.
Need help requesting additional information or have questions regarding this Technology Offer?
Contact Innoget support

