An Architecture-Level Wrist Platform Enabling Reliable and Scalable Robotic Manipulation in Contact-Rich Tasks.
Patents for licensing
This technology is an architecture-level robotic wrist platform that addresses reliability limits caused by structural coupling in conventional wrist designs.
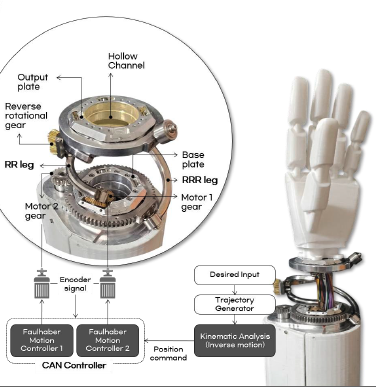
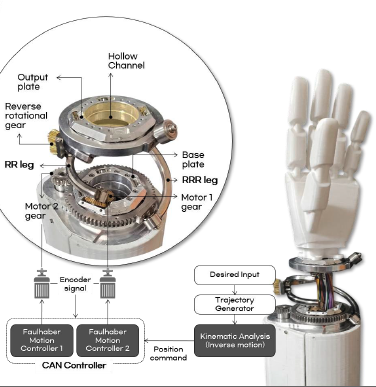
By structurally decoupling range of motion, stiffness, and tendon routing through a parallel linkage with an intermediate plane, the platform achieves wide motion, high rigidity, and stable load handling without control compensation.
A large hollow routing channel enables scalable wire and sensor integration independent of wrist orientation.
The design provides consistent manipulability and prevents abrupt payload drops in contact-rich robotic manipulation.
Robotic wrist reliability is a critical bottleneck in high-load, contact-rich manipulation, where unexpected object drops and instability frequently arise from structural coupling between motion range, stiffness, and tendon routing. Conventional wrist architectures—including differential serial, spherical parallel, and singularity-aware designs—inevitably trade off dexterity, rigidity, routing space, or integrability, limiting scalability for real-world deployment.
This platform introduces an architecture-level solution based on a parallel linkage with an intermediate plane and reverse power transmission. The intermediate plane structurally cancels motion coupling, enabling wide range of motion and high structural rigidity simultaneously, without relying on active control compensation. A large hollow routing channel maintains orientation-independent paths for tendons, cables, and sensors, improving integration scalability and long-term reliability.
Kinematic evaluations demonstrate wide task-oriented isotropy across usable workspaces and stable minimum payload characteristics without abrupt drop-off across wrist angles. Compared to gimbal, omniwrist, and spatial parallelogram designs, the proposed wrist provides superior routing capacity and target-oriented isotropy while maintaining compactness.
The technology is suitable for humanoid robots, teleoperation systems, mobile manipulators, and tool-integrated end-effectors. Commercialization pathways include IP licensing (exclusive or non-exclusive), collaborative R&D with robot subsystem manufacturers, and joint development of wrist or end-effector modules for next-generation robotic platforms.
IBU Inc. is a technology commercialization and consulting firm supporting licensing, co-development, and venture creation based on deep-tech and research-originated technologies.
The company operates as a technology transfer partner, startup studio, and accelerator, working with universities, research institutes, and industry players.
IBU Inc. connects technology owners with corporate partners and investors by structuring collaboration models, commercialization strategies, and market-oriented pathways.
Create your free account to connect with Taeho Kim and thousands of other innovative organizations and professionals worldwide
Send a request for information
to Taeho
Technology Offers on Innoget are directly posted
and managed by its members as well as evaluation of requests for information. Innoget is the trusted open innovation and science network aimed at directly connect industry needs with professionals online.
Need help requesting additional information or have questions regarding this Technology Offer?
Contact Innoget support

