Showing 1 to 15 of 2075 results
![Granulated Or Pelleted Organic Fertiliser Production Via Controlled Composting Of Agricultural Biogas Digestates, Wastes, Food Pro[…]](https://static7.innoget.com/uploads//2066755698ce5526f7b9638ab625213ee2718bba.jpg)

Granulated Or Pelleted Organic Fertiliser Production Via Controlled Composting Of Agricultural Biogas Digestates, Wastes, Food Pro[…]
Innovative Products and Technologies Laser Consult Ltd.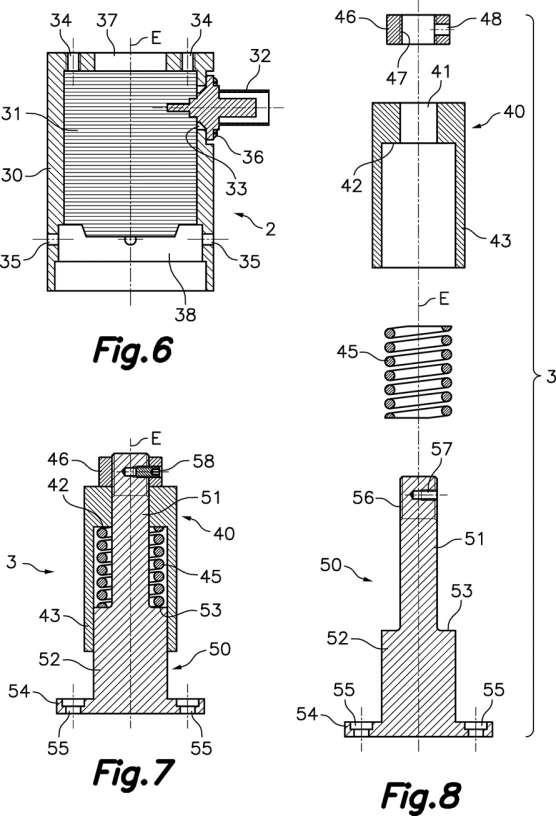

Vibration-Assisted ball burnishing
Patents for licensing Universitat Politècnica de Catalunya - UPC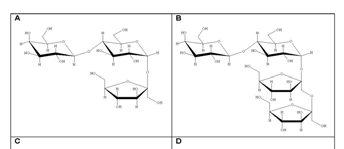

Obtaining of food-grade natural prebiotic oligosaccharides by enzymatic synthesis from disaccharides
Patents for licensing Consejo Superior de Investigaciones Científicas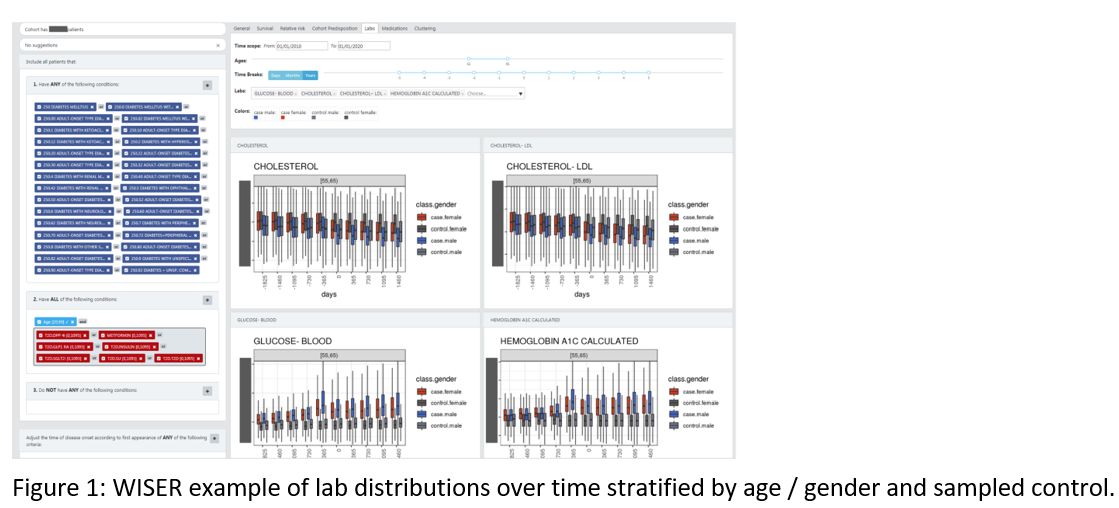

WISER – A Holistic Analysis Of Large Scale Electronics Health Records
Patents for licensing Yeda

A method for pharmaceutical-origin micropollutants removal from wastewater
Innovative Products and Technologies Luxembourg Institute of Science and Technology (LIST)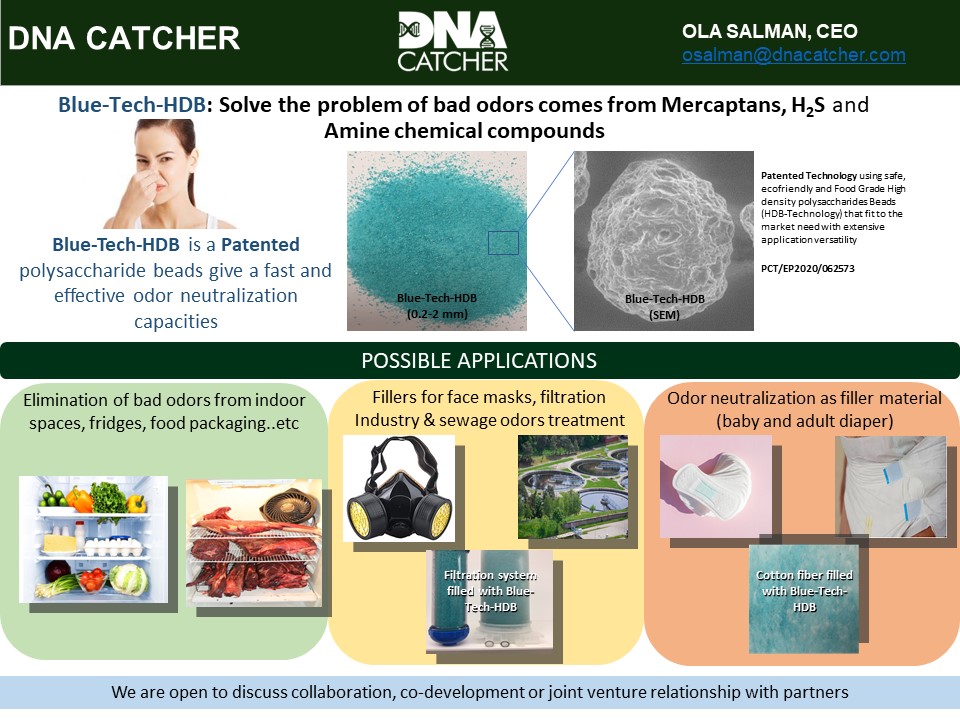

Blue-Tech-HDB, Solving the problem of bad odors comes from of Mercaptans, H2S and Amine.
Innovative Products and Technologies DNA CATCHER S.L.U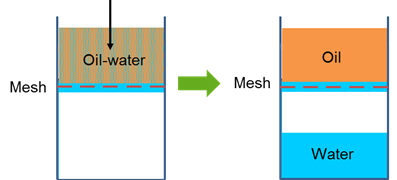

Coated meshes/filters for oil-water separation
Patents for licensing BASF SE
Winemaking yeast for use in nitrogen-deficient musts
Patents for licensing Hub APTA
A high capacity, automatic and small-volume water sampler
Innovative Products and Technologies Luxembourg Institute of Science and Technology (LIST)

CATCHAPs/HIPS to test and improve the security
Patents for licensing Universidad de Alcalá-OTRI
Control of neurodegenerative diseases with benzothiazole-benzamide derivatives
Patents for licensing Consejo Superior de Investigaciones Científicas
Simple and innovative detection method for acetic acid
Patents for licensing Universidad de Alicante
TWISCO – Digital TWIn for Sustainable Supply Chain in Construction
Innovative Products and Technologies Luxembourg Institute of Science and Technology (LIST)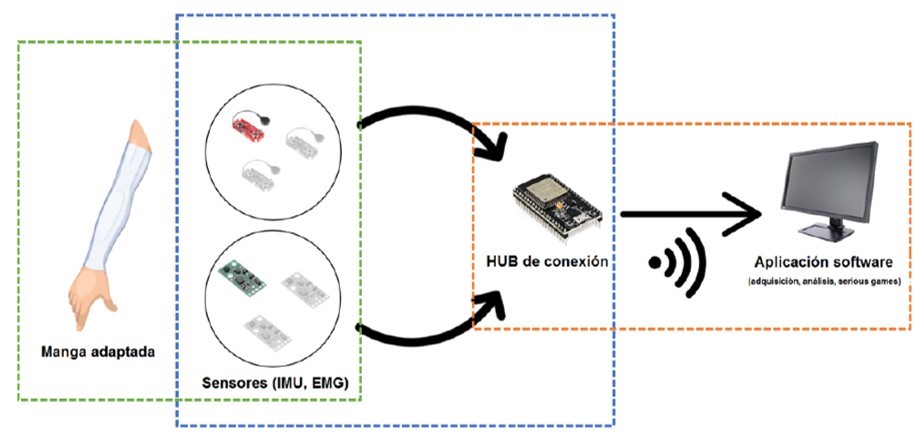
Low-cost sensorised device for (tele-)rehabilitation
Patents for licensing Universidad de Alicante
